Aumentando o jogo de inspeção de pipeline
-109094 "XO-450 da XOCEAN (Foto: XOCEAN)")
Há um abalo no negócio de inspeções de oleodutos. Veículos com operação remota (ROV) mais evoluídos, aspirações digitais e embarcações de superfície não tripuladas (USV) estão impulsionando uma nova era de aquisição de dados e entregas.
Está oferecendo uma espécie de revolução na quantidade de novas idéias que os operadores podem adquirir em seus pipelines, reduzindo o tempo de campanha no exterior.
Alguns dos que operam no espaço são Equinor, Shell e BP. Um grande impulsionador vem reduzindo custos e minimizando a exposição à segurança. É a mais recente evolução neste espaço, Tom Glancy, Mapeador de Pipeline Advisor e Informações Geográficas da Equinor, delineado em uma reunião da Sociedade Hidrográfica de outubro em Aberdeen.
Ele diz que a operação remota de veículos - durante sua própria carreira - passou de submersíveis tripulados sem corda (colocando os seres humanos em risco) para ROVs, para veículos subaquáticos não tripulados (UUV, geralmente chamados de veículos subaquáticos autônomos / AUVs, embora não sejam totalmente autônomos). Glancy). Enquanto a mudança para os ROVs removeu os seres humanos do risco, a corda que os conectava a uma embarcação de suporte limitava seu escopo. AUVs significavam que as pesquisas poderiam ser feitas mais rapidamente, mas os AUVs não eram capazes de parar e fazer avaliações pontuais detalhadas se e quando um problema fosse detectado.
Uma evolução mais recente foi em direção a ROVs rápidos. A Equinor mantém acordos com os dois principais fornecedores, o DeepOcean, usando o ROV Superior, e a Reach Subsea com o Surveyor Interceptor ROV, diz Glancy. Enquanto os dois estão amarrados, eles podem fazer um levantamento mais rápido que um ROV, a 4 nós (kt) em comparação com o 2kt, diz Glancy, em parte graças à sua imagem HD integrada e pacotes de laser. Mas isso também significa que eles vêm com uma embarcação de apoio - e despesas gerais que acompanham.
Esses ROVs rápidos tornaram-se uma ferramenta popular, alterando completamente o fluxo de trabalho de inspeção de tubulação tradicional. “Nas duas últimas três décadas, a inspeção de dutos foi um fluxo de trabalho relativamente simples; uma campanha, utilizando dois contratados, fazendo duas pesquisas separadas ”, começando em abril e terminando em agosto, Calum Shand, pesquisador sênior de projetos da Shell, disse à Offshore Europe em Aberdeen no início deste ano. Primeiro, um navio de pesquisa geofísica reboca um veículo rebocado operado remotamente (ROTV) com um sonar de varredura lateral sobre as seções do oleoduto em águas abertas. Relatórios de anomalia são criados, necessitando de uma segunda pesquisa em que um ROV da classe de trabalho (com um navio da classe DP2) realiza mergulhos pontuais e adquire filmagens de vídeo que são usadas para planejar qualquer retificação adicional. Mas, "é demorado e relativamente ineficiente, no que diz respeito ao uso de uma campanha de duas embarcações", diz Shand.
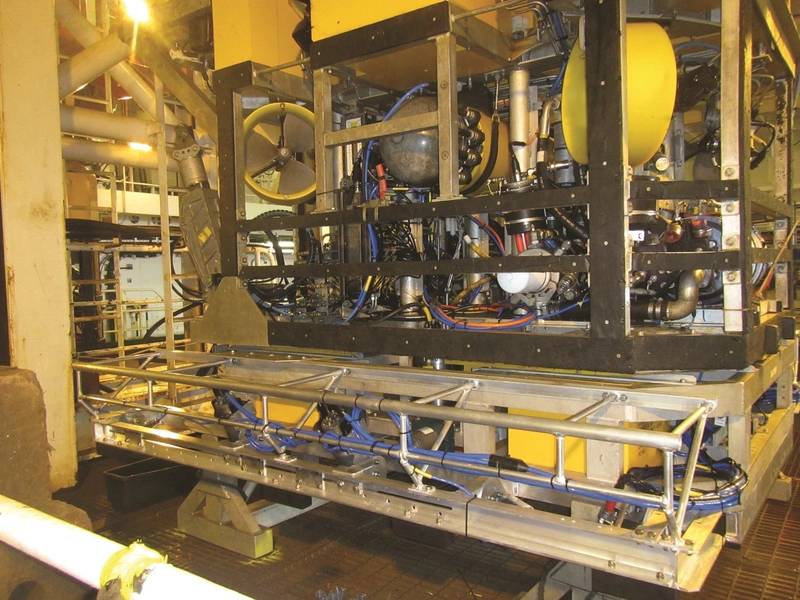
 O SROV Superior (Foto: DeepOcean)
O SROV Superior (Foto: DeepOcean)
Aumentando a eficiência
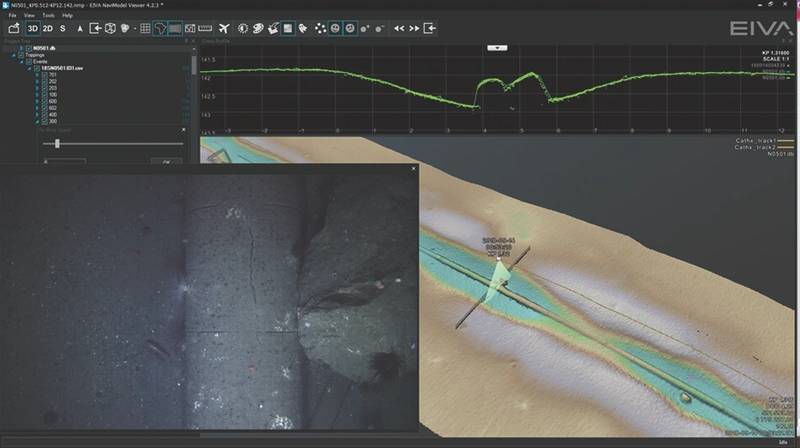
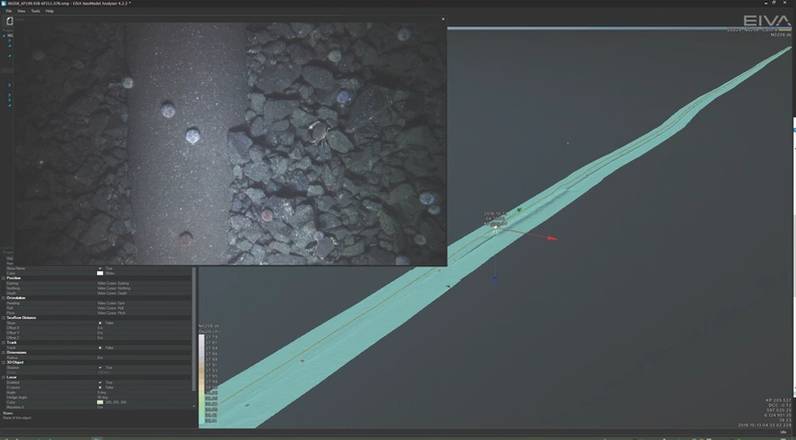
Para a Shell, com mais de 200 oleodutos e umbilicais, totalizando 3.000 quilômetros (km) de comprimento, somente no Mar do Norte do Reino Unido, pesquisas mais fáceis e rápidas são um bônus tangível. Em 2018, a Shell realizou uma nova pesquisa usando o "Fast Digital Imaging Service" do DeepOcean. Isso envolveu um ROV Kyst Design Superior, com capacidade de rastreamento automático, operado a partir da embarcação Edda Flora em uma campanha sem interrupção de 45 dias, a partir de setembro de 2018. O Superior foi equipado com sirenes de eco com feixe duplo Teledyne, sonar de varredura lateral Edgetech e perfilador inferior, pipetracker, câmeras CathX de ultra-alta definição (UHD) (x3) e navegação inercial de alta especificação. A capacidade de lançar a embarcação em mares de até 4,5 metros significava que o trabalho poderia ser iniciado no início da temporada e chegar até o outono, diz Shand, com velocidades de 5 kt no modo acústico e 3,5-4 kt para inspeção de dutos.
Além disso, ter o sonar de varredura lateral significava que a embarcação poderia sair da pesquisa de oleoduto para executar “trabalhos ad-hoc fly-by”, como uma pesquisa de levantamento de instalações no campo de Shearwater, diz Shand. Mas, o maior benefício foram as fotos UHD criadas pelo sistema CathX, que possibilitaram “detalhes incríveis”. “Quando você aumenta o zoom, você apresenta detalhes subcentímetros e pode fazer inferências sobre o que está acontecendo, como pontuar no topo de um cano por interferência na pesca”, diz ele.
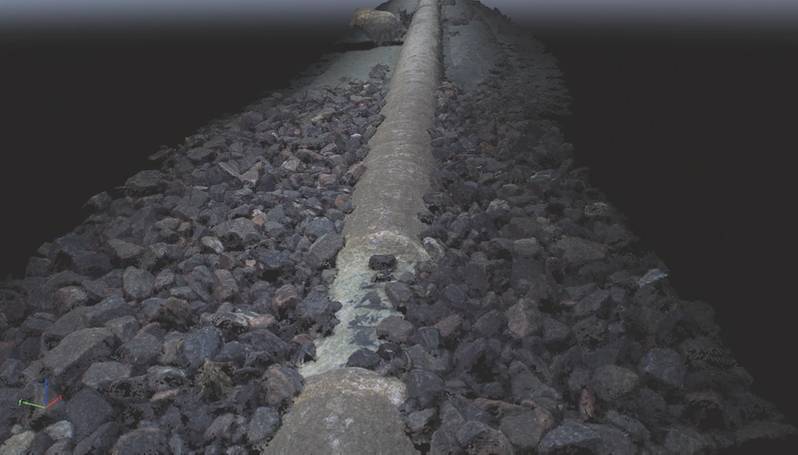
Combinadas com dados de batimetria de feixe múltiplo de alta resolução, essas fotos em UHD oferecem uma maneira completamente nova de revisar incidentes e anomalias, através de modelos de malha 3D e nuvens de pontos de cores, com a comparação automática dos conjuntos de dados de pesquisas anuais agora possíveis, diz ele. "Esses conjuntos de dados estão criando uma grande confusão", diz Shand. "É uma mudança radical."
 (Imagem: Shell)
(Imagem: Shell)
Decisões de condução de dados
Com esse recurso, a correção também pode ser mais rápida. Por exemplo, ao descobrir uma nova extensão livre de oleoduto, a Shell conseguiu exportar os dados de feixe de muilt e passá-los para o empreiteiro - Van Oord - que conseguiu calcular com precisão a quantidade de rocha necessária. Além disso, os engenheiros de pipeline agora têm mais capacidade de comparar informações herdadas 'como construídas', com dados multibeam recentemente 'encontrados'.
Este ano [2019], a Shell voltou a sair, desta vez com a Reach Subsea usando o veículo Surveyor Interceptor, projetado com MMT e Kyst, equipado com braços de lança. Eles fornecem uma melhor cobertura circunferencial do tubo. "Passamos de fazer uma campanha com duas embarcações para uma campanha com uma única embarcação / contratada", diz Shand. “Economizamos cerca de £ 800.000 (US $ 1 milhão), em comparação com a maneira antiga de fazê-lo, e emitimos menos dióxido de carbono (CO2) como conseqüência” em grande parte graças ao 50% menos tempo do navio.
Houve uma curva de aprendizado, especialmente em torno de tentar automatizar o processamento de dados associado e, em seguida, lidar com o grande volume de dados gerado, acrescenta Shand. Existem também algumas barreiras para fazer esse trabalho de maneira diferente, relacionadas a comportamentos e fluxos de trabalho. Porém, Shand diz que o potencial é significativo, incluindo a integração de dados de pesquisa modelados em 3D externos, vinculados ao GIS, com modelos CAD e também dados de inspeção interna de tubulações, permitindo uma visão poderosa de todo o sistema de tubulação. Acrescentar visão de máquina e aprendizado profundo a isso, onde a detecção de rochas, detritos, limpeza etc. é automática, permitirá operações mais automatizadas e maior capacidade de análise preditiva em vez de operações reativas, diz Shand.
 (Imagem: Shell)
(Imagem: Shell)
Inspeção rápida de imagens digitais
A Inspeção Rápida de Imagens Digitais (FDII), passando de vídeo para digital, que pode permitir eventos automatizados e aumentar a velocidade da inspeção, também tem sido uma força motriz para a BP. Eric Primeau, especialista sênior em tecnologia da BP, disse à conferência Underea Robotics da Subsea UK em Aberdeen que se trata de adotar uma abordagem de baixo para cima, selecionar um pacote de sensores e o veículo em que o pacote deve continuar, em vez de escolher o veículo primeiro.
A empresa realizou sua primeira campanha de FDII com o DeepOcean em 2017, realizando 478 km de inspeção de dutos, com imagens digitais UHD, laser, multibeam de cabeça dupla e sonar de varredura lateral a uma média de 5,1 km / hora. O projeto foi concluído em 94,7 horas, em comparação com 578 horas previstas com uma metodologia tradicional. Os dados finais incluíram malha 3D e nuvens de pontos de laser coloridas.
A BP acompanhou outras duas campanhas em 2018, com MMT e i-Tech7, e depois outra em 2019, novamente com a i-Tech7. Ao longo desses projetos, a BP também testou sensores de proteção catódica de gradiente de campo sem contato. Como Shand, no entanto, o processamento dos dados coletados por essa abordagem tem sido um desafio.
 (Imagem: BP)
(Imagem: BP)
Ficar sem embarcação de superfície tripulada
No entanto, esse método ainda requer o uso de uma embarcação de apoio tripulada. Portanto, as operadoras têm seguido o uso de USVs para inspeção de tubulações. No início deste ano (2019), a BP tentou a inspeção de dutos usando um XOCEAN XO-450 USV - o primeiro no Mar do Norte. Ao implantar o USV em Peterhead, no nordeste da Escócia, a BP pesquisou uma seção de águas rasas do oleoduto de exportação abandonado de 30 polegadas da Miller. Em uma segunda execução, de apenas 2,5 m de profundidade de água a 40 m de profundidade em uma seção de tubulação de 4,75 km, o USV foi instalado com um sistema multibeam R2Sonics Dual Head, perfilador de velocidade sonora Valeport SWiFT e Applanix POSMV OceanMaster para direção de veículo, atitude, heave e velocidade.
O sucesso do projeto Miller levou a BP a comissionar o mesmo sistema para implantação no Mar Cáspio, no Azerbaijão, para inspeção de centenas de quilômetros de dutos de águas rasas (profundidade de 12 a 25 m). “A indústria offshore está à beira de grandes mudanças à medida que o uso de USVs aumenta e as funcionalidades se desenvolvem. Está desafiando o uso de embarcações tripuladas para inspeções de rotina ”, diz Primeau. “O USV está se tornando uma ferramenta padrão para a realização de pesquisas no fundo do mar de alta resolução e também é uma porta de entrada para o desenvolvimento de sistemas subaquáticos complementares, como a integração de ROVs e AUVs.”
Shand diz que a Shell também estudou USVs, testando um XOCEAN XO-450 ao longo da costa norte de Aberdeen em uma breve pesquisa experimental em 2019. Aqui, embora dados e largura de banda sejam um desafio, a implantação de 5G e o uso de a nuvem ajudará, abrindo a porta para inspeção e análise em tempo real, diz ele.
A Equinor também usa USVs para pesquisa de dutos. Em setembro de 2019, a XOCEAN concluiu pesquisas de oleoduto para a Equinor na costa leste da Inglaterra e na costa norte da Alemanha. Usando o MBES, quatro oleodutos que totalizam 120 milhas de comprimento entre 2-40 metros de profundidade da água, foram pesquisados em lâminas d'água de 2-40 metros, disse a XOCEAN. Outro operador de embarcação da USV, 4D Ocean, realizou pesquisas costeiras para a Equinor no início deste ano com um MBES montado no casco.
A XOCEAN também fez o que reivindicou ser a primeira pesquisa de tubulação de proteção catódica (TWCP) com fio de arrasto de um USV, também em setembro de 2019. Isso envolveu pesquisas TWCP, com sonar multibeam, para o PX Group em tubulações a até 9 km da costa, perto de Shetland e ao largo da costa de Aberdeenshire. O PX Group opera e mantém, para o North Sea Midstream Partners, o St Fergus Gas Terminal e os associados offshore Frigg UK e Shetland Island Regional Gas System (SIRGE) que ligam a instalação de Aberdeenshire ao Mar do Norte.
 (Imagem: Shell)
(Imagem: Shell)
Combinando USVs com AUVs
No entanto, os sensores a bordo dos USVs atingirão apenas tão profundo. Se for necessário realizar pesquisas mais profundas em tubulações de água com USVs, é necessária uma abordagem alternativa. Isso significa implantar um AUV a partir de um USV - e é exatamente isso que a Swire Seabed tem feito pela Equinor, na Noruega. Em outubro de 2018, no primeiro de dois projetos, implantou um AUV Kongsberg Hugin com uma pequena embarcação de superfície que lhe permitiu manter atualizações de posição e comunicação com um controle de Bergen. As inspeções foram realizadas em três oleodutos entre Kollsnes (uma planta em terra) e Troll A (a apenas 65 km de Bergen). No total, 180 km de tubulação foram inspecionados em dois mergulhos AUV com sonar de abertura sintético batimétrico e dados de imagem em HD adquiridos para verificar a integridade dos oleodutos submarinos.
Em julho de 2019, a Swire reivindicou a “primeira inspeção de dutos offshore totalmente não tripulada 'no horizonte'”, pesquisando até 100 km da costa, novamente para a Equinor. Isso viu um Hugin com MBES, sonar de varredura lateral e sistema de câmera CathX, usado em conjunto com um SEA-KIT Maxlimer USV, fabricado pela empresa britânica Hushcraft. Quatro oleodutos, totalizando 175 km de extensão, foram pesquisados, novamente usando sonar de abertura sintético batimétrico e dados de imagem em HD. O uso do SEA-KIT Maxlimer significava que o Hugin poderia permanecer no mar por mais tempo - atracar no mar no USV para recarregar, além de usá-lo como um link de comunicação e controle para o centro remoto em Bergen. A Swire diz que, usando um pequeno navio não tripulado, o uso de combustível - e as emissões de carbono - são reduzidos em 95%. Tom Glancy coloca de outra maneira - colocar as pessoas no exterior é reduzido em 100%. Seu objetivo final é não ter nenhum vaso de superfície.
[Nota do editor: a Swire Pacific Offshore (SPO) anunciou em novembro que fechará sua subsidiária da Swire Seabed a partir do final de fevereiro de 2020, enquanto as empresas de serviços de campos petrolíferos continuam sentindo os efeitos da desaceleração da indústria. Os navios atualmente gerenciados pela Swire Seabed serão operados e comercializados como parte da frota da SPO com sede em Cingapura.]
 O SEA-KIT abriga um Hugin AUV para operação remota de tubulação. (Foto: Swire Seabed)
O SEA-KIT abriga um Hugin AUV para operação remota de tubulação. (Foto: Swire Seabed)
Os próximos passos
Alguns estão trabalhando nisso. Em 2018, a Modus Seabed Intervention implantou um de seus HAUVs (um Saab Seaeye Sabertooth AUV modificado) na costa noroeste da Austrália para realizar aproximadamente 240 km de pesquisa de dutos usando um perfil de laser CathX Scout e imagens HD espalhadas ao lado de um ecossounder multibeam (MBES). Embora isso tenha sido realizado com o HAUV em uma corda de um navio, para a coleta de dados em tempo real, seria possível sem a corda, a empresa, que tem mais projetos em andamento, por assim dizer.
O veículo híbrido Freedom da Oceaneering, embora muito promovido em relação aos veículos residentes submarinos, foi de fato inicialmente projetado para pesquisa de dutos autônomos. O objetivo principal da Oceaneering era ter um veículo aerodinâmico eficiente que pudesse parar e realizar trabalhos de inspeção adicionais, se detectasse uma anomalia. De fato, Steffan Lindsø disse em um evento de demonstração do Underwater Intervention Drone perto de Stavanger em outubro que o primeiro projeto do veículo, em 2020, seria uma inspeção de oleoduto, "provavelmente no Reino Unido".
A Kawasaki Subsea também está testando seu veículo de segunda geração, que incorpora rastreamento de oleoduto para inspeção de pesquisa, no exterior do Japão. Este ano (2020) chegará ao total para testar o rastreamento de tubos com o DeepStar e a Nippon Foundation. Houve uma interrupção no espaço de inspeção do oleoduto e ainda há mais por vir.
As tecnologias de visão de máquina também estão ajudando a melhorar a forma como as pesquisas de dutos são fornecidas. A i-Tech 7, parte da Subsea 7, é uma das empresas que fornece serviços de inspeção digital rápida de inspeção de perto, cada vez mais suportados pela automação.
 (Foto: i-Tech 7)
(Foto: i-Tech 7)
FDII
Seus serviços rápidos de pipeline de inspeção digital são fornecidos por meio de um skid dedicado que pode ser facilmente transportado e mobilizado a bordo de qualquer ROV da classe de trabalho em sua frota, dependendo de onde os serviços são necessários. O skid está equipado com uma suíte CathX Pathfinder modificada, que possui três câmeras de ultra-alta definição - porta, centro e estibordo - perfis a laser e uma câmera piloto, sincronizadas entre imagens estáticas (um recurso de segurança, de modo que o LED estroboscópico de alta potência luzes não influenciam a visão do piloto do ROV).
O uso de um conjunto de imagens digitais como esse significa que as pesquisas podem ser realizadas mais rapidamente, a 3-4,5 km / hora, em comparação com as pesquisas baseadas em vídeo que tradicionalmente são realizadas a 1 km / hora para permitir eventos manuais on-line e evitar imagens borradas, diz Danny Wake, Topógrafo, i-Tech 7. Um projeto geral de inspeção visual para a BP, em 2018, que abrangeu oito oleodutos, com um comprimento total de 310 km, mais duas inspeções de estrutura, economizou 10 dias de embarcações (levando pouco mais de 14 dias) contra velocidades tradicionais de inspeção de tubulações. Economias equivalentes foram realizadas para a campanha de inspeção de dutos FDII de 2019 para a BP, com o benefício adicional de contribuir para a redução de emissões de CO2.
Os engenheiros de pipeline também obtêm modelos ortomósicos e 3D do pipeline, que podem ser localizados espacialmente (em vez de sequencialmente, como vídeo). Mas isso não é tudo. A I-Tech 7 vem trabalhando com a empresa americana de TI, ciência e tecnologia Leidos em maneiras de automatizar as rotinas de processamento de dados para fornecer informações úteis aos engenheiros mais rapidamente. Por exemplo, analisando automaticamente imagens para extrair imagens contendo possíveis eventos, reduzindo drasticamente a quantidade de imagens a serem revisadas por um ser humano. A i-Tech 7 realizou sua primeira pesquisa usando essas técnicas este ano (2019).
Curiosamente, é uma técnica não limitada às imagens digitais. Cerca de 60% dos algoritmos desenvolvidos para inspeção digital também funcionam em vídeo, diz George Gair, gerente de inspeção global da i-Tech 7, fazendo uso mais amplo dessa tecnologia.
"O Santo Graal é classificação e eventos automáticos", diz Wake. “Estamos dando passos para isso, ajustando os algoritmos, aumentando a automação, começando com a visão de máquina que detecta possíveis eventos.” O próximo passo é realizar a detecção ao vivo, dando aos engenheiros acesso mais rápido aos resultados da inspeção para que possam agir de acordo com eles. mais rapidamente.
 (Imagem: i-Tech 7)
(Imagem: i-Tech 7)
Apesar do entusiasmo em torno desses tipos de tecnologias, incluindo o aprendizado de máquina, que usa o poder da computação para comparar milhões de imagens e detectar atributos específicos, não é tão fácil, especialmente em um setor que gosta de fazer o oposto de projetos padronizados. Ter os dados de treinamento - imagens de tubulações - também é difícil.
Porém, cerca de 90 a 95% dos problemas de integridade de dutos encontrados tendem a estar relacionados à exposição a freespan e enterro, diz Gair, portanto esse foi o foco principal da empresa. Os danos, que tendem a ser atípicos, levarão mais tempo. Os seres humanos também ainda serão necessários em algumas partes do processo, diz ele.
Em termos de plataforma de veículo, o i-Tech 7 ficou com patins baseados em ROV. Embora o uso de AUVs também ajude a realizar pesquisas mais rapidamente, eles tendem a nadar mais acima da tubulação e não necessariamente carregam os pacotes completos de sensores FDII que oferecem uma visão abrangente do tubo, diz Wake. Embora tenha havido foco em ter sistemas capazes de parar e coletar mais dados se uma anomalia for detectada, ele diz, com os dados do FDII, onde você pode ver o tubo de mais ângulos do que apenas acima em resolução ultra-alta, os engenheiros já têm todas as informações de que precisam - eles não precisam voltar e fazer uma inspeção mais detalhada.
A tecnologia como facilitadora da segurança energética na Ásia offshore

Desativação de poços: Expandindo horizontes para inovadores com experiência comprovada.
-170109 "(Crédito: Odfjell Technology)")
A oferta restrita impulsiona o aumento das diárias de AHTS de alto padrão.

Conflito no Oriente Médio abala o mercado de perfuração offshore

A Van Oord instala monopiles para o primeiro parque eólico offshore da Polônia.
-169994 "(Crédito: Van Oord)")
Jadestone garante acordo de venda de gás para campos offshore no Vietnã.

Petrobras assume a operação de bloco offshore na África Central.
")
Transocean garante contrato de US$ 158 milhões para plataforma de perfuração no Mediterrâneo Oriental.
")
Petrobras recompra participação da Petronas em dois campos marítimos no Brasil.
-169710 "FPSO Cidade de Campos dos Goytacazes (Crédito: MODEC)")
China conecta seu parque eólico offshore "mais profundo" à rede elétrica.
")
Eni faz descoberta de gás na costa do Egito e planeja desenvolvimento acelerado.
-169548 "Ilustração (Crédito: Eni)")
Valaris garante extensão de contrato de US$ 447 milhões para perfuração no Brasil e firma acordo de colaboração no Suriname.

-169503 "Navio de perfuração VALARIS DS-4 (Crédito: Valaris)")