Residência em espera
")
Tem sido uma visão ter veículos subaquáticos capazes de apoiar operações submarinas sem depender de uma embarcação de superfície. Estamos mais próximos dessa visão do que nunca, mas o que há de novo que não estava em vigor antes para fazer isso acontecer?
No início deste ano, foi alcançado um marco em veículos subaquáticos no setor de petróleo e gás. Um veículo subaquático autônomo (AUV) ancorou, carregou e baixou dados sem fio, todos indutivamente, com controle automatizado remoto e controle visual ao vivo durante uma demonstração em um lago na Suécia. A doca era a estação de ancoragem submarina padrão aberta (SDS) da Equinor e o veículo era o Sabertooth da Saab Seaeye.
É um passo no sentido de ter veículos permanentemente submarinos e mais manifestações estão chegando, enquanto outros colocam seus novos veículos à prova. Mas, alguns dirão que já estivemos aqui antes; isso foi tentado na década de 1990. Quais as novidades? É uma combinação de forças - orientada para o mercado e orientada para a tecnologia.
Para Gro Stakkestad, gerente de intervenção submarina e reparo de dutos, na Equinor, é uma combinação da desaceleração, uma unidade de automação e aumento da conscientização ambiental. Steffan Lindsø, diretor de tecnologia emergente da Europa na Oceaneering, diz que as comunicações offshore têm sido o principal componente ausente, além dos avanços nas tecnologias de bateria e navegação, enquanto Sean Halpin, diretor de gerenciamento e marketing de produtos da nova empresa Houston Mechatronics, diz que a redução de custos e o acesso ao poder da computação são grandes motivadores. Movimentos em direção a toda a infraestrutura de campo elétrico também ajudarão.
A peça final
Para Jan Siesjö, engenheiro-chefe da Saab Seaeye, reunir acoplagem, carregamento e download de dados foi a peça final do quebra-cabeça para trazer essa capacidade para o campo. Porém, tem havido muitos outros trabalhos em segundo plano, principalmente em torno dos recursos de controle remoto.
“O controle remoto por longas distâncias pode parecer simples, mas para torná-lo confiável, você precisa de muitas coisas no local. Não é apenas enviar comandos pela Internet, é ter sistemas que podem se manter seguros, podem ser mantidos para que não dêem errado e se algo der errado, não é tão complexo que você precisa de um engenheiro de nível universitário para consertá-lo. ” inclui manutenção de estação, navegação de waypoint e prevenção de obstáculos.
No lado das comunicações, a Saab Seaeye tem trabalhado com a Boeing, executando um veículo subaquático (ROV) operado remotamente por uma classe leve de trabalho Leopard através de um link de satélite nos EUA, realizando trabalhos de manipulação, conectores, missões de voo, controle de waypoint etc. Tivemos algumas limitações bastante rígidas, apenas 1 mb / s, e uma latência que aumentamos por três segundos e mexemos intencionalmente com a qualidade dos dados ”, diz Siesjö. “Apesar disso, conseguimos acoplar os conectores de chumbo voador e fazer muitas outras coisas. O objetivo a longo prazo é fazer um ROV sair de um AUV muito grande e realizar trabalhos de intervenção de várias maneiras. ”
 Sabertooth da Saab Seaeye, que demonstrou carregamento indutivo e download de dados na Suécia no início deste ano. (Foto: Saab Seaye)
Sabertooth da Saab Seaeye, que demonstrou carregamento indutivo e download de dados na Suécia no início deste ano. (Foto: Saab Seaye)
Trabalhar em profundidade é outro desafio - chegar a um site e manter links de comunicação. No início deste ano, a Saab Seaeye testou esse cenário, fazendo três semanas de testes em 2.400 metros de profundidade no Mediterrâneo - amarrados e autônomos - com comunicação e posicionamento do veículo 100% bem-sucedidos, mesmo com tração total de até 4 nós, diz Siesjö. O trabalho nessas profundidades incluía determinar como viajar para um local de trabalho com eficiência - 2.400 metros é um longo caminho - enquanto mantém o posicionamento, usando uma combinação de sistema de navegação inercial (INS) e posicionamento da linha de base ultra-curta (USBL).
A Saab Seaeye está apoiando seu trabalho com simuladores de alta fidelidade (como os usados para testar os caças da empresa-mãe), para que possa executar todos os sistemas de controle autônomos e humanos em loop com seu software de controle nativo e descobrir se eles funcionam - muito antes de entrarem na água.
Além disso, está trabalhando em como os veículos podem construir, em tempo real, mapas 3D do ambiente em que estão, usando um sistema de câmera estéreo para fazer localização e mapeamento simultâneo em 3D (SLAM). Isso permitirá que o veículo navegue e meça o que vê em relação a si mesmo. A Saab Seaeye está testando essa capacidade desde 2018, construindo nuvens 3D do mundo subaquático.
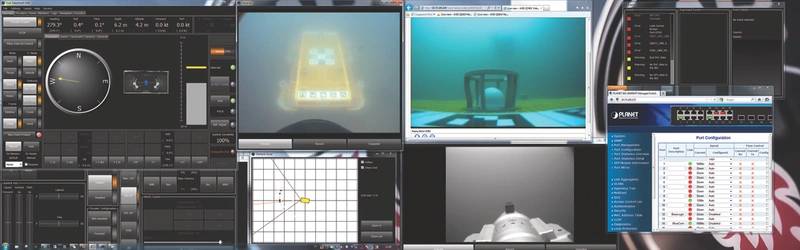 Com controles remotos avançados simples de usar, o encaixe foi demonstrado, com um feed de vídeo ao vivo em terra. (Imagem: Saab Seaye)
Com controles remotos avançados simples de usar, o encaixe foi demonstrado, com um feed de vídeo ao vivo em terra. (Imagem: Saab Seaye)
Geosub para AIV
Outra empresa que vem desenvolvendo essa capacidade há algum tempo é a Subsea 7. Nos anos 90, estava atrás do Geosub, uma tecnologia licenciada pela Subsea 7 pelo Centro Nacional de Oceanografia (NOC). Seu principal objetivo era a inspeção autônoma de oleodutos, usando navegação de waypoint e rastreamento automático para aumentar os dados das pesquisas sobre o fundo do mar, reunindo qualidade e eficiência e reduzindo o suporte a embarcações de superfície. Embora tenha sido um sucesso em termos de qualidade dos dados, ele ainda precisava ser lançado e recuperado de um navio e precisava de suporte de superfície para o posicionamento. Também não podia fazer medições de proteção catódica, por isso era limitado.
A Subsea 7, por meio de seus negócios i-Tech 7, seguiu em frente e agora possui seu veículo de inspeção autônomo (AIV), central para o qual é a capacidade de realocação, desenvolvida sob seu precursor, o Prototype AIV, para que não precise de posição regular atualizações de um navio de superfície. “O desenvolvimento foi desencadeado por uma decisão de mudança para veículos autônomos, concentrando a capacidade na inspeção de infraestrutura submarina no campo. Como o objetivo agora estava focado na inspeção de equipamentos existentes, o próprio equipamento poderia ser rastreado para fornecer as posições precisas e necessárias para navegar sem atualizações de um navio de superfície. ”É semelhante ao rastreador automático, mas em 3D e pode ser descrito como uma forma de BATER.
A AIV também possui seu próprio sistema de ancoragem submarina, que desconecta as operações de lançamento e recuperação das embarcações. “A introdução de um planejamento simplificado de missões, vinculado à relocalização da navegação elétrica e a um processo em que o AIV poderia se auto-atracar na cesta, quebrou efetivamente o vínculo com a dependência da embarcação”, diz Jamieson.
 Operações remotas também estão sendo feitas com ROVs. Este é o centro de controle onshore da i-Tech 7 para operações de ROV. (Foto: i-Tech 7)
Operações remotas também estão sendo feitas com ROVs. Este é o centro de controle onshore da i-Tech 7 para operações de ROV. (Foto: i-Tech 7)
Docking padronizado
Um grande impulso nessa área veio de empresas como a Equinor, buscando uma visão de "drones de intervenção subaquática" (UID), como é chamada, e adjudicando contratos, inclusive para o design de um SDS de padrão aberto que qualquer veículo possa usar . O design do SDS incorpora conectores indutivos das marcas Blue Logic e WiSub e AruCo e ChaRuCo, que a câmera do drone vê exercendo sua posição relativa. A empresa de comunicações e posicionamento acústicos Trondheim, Water Linked, também está fornecendo pequenos modems acústicos para posicionamento de veículos na estação. O SDS também pode acomodar outros sensores, como o modem óptico de espaço livre BlueComm da Sonardyne para feeds de vídeo ao vivo ou download de dados de alta largura de banda. Também existem interfaces padrão, sendo desenvolvidas através do grupo SWiG (Subsea Wireless Interface Group) e Deepstar, para a mecânica.
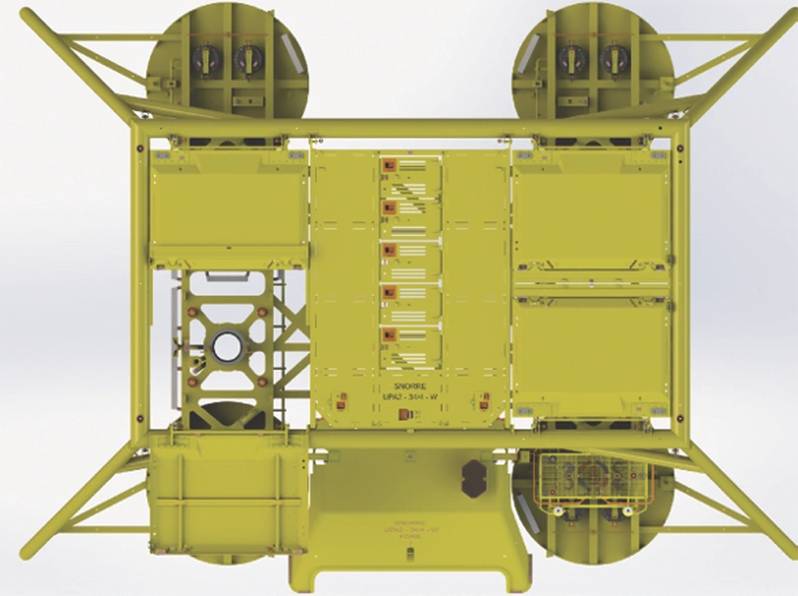 O design da estação de ancoragem submarina de padrão aberto da Equinor, mostrado encaixando-se em um coletor, como um pequeno bloco de helicóptero. (Imagem: Blue Logic)
O design da estação de ancoragem submarina de padrão aberto da Equinor, mostrado encaixando-se em um coletor, como um pequeno bloco de helicóptero. (Imagem: Blue Logic)
O SDS, construído pela Blue Logic na Noruega, foi implantado em uma doca em Trondheim e também a 2,2 quilômetros da costa da Estação Biológica de Trondheim, a 350 metros de profundidade. Outro está indo para o campo de Åsgard, onde um “robô cobra” da Eelume operará em uma corda de energia e fibra óptica conectada à unidade de produção flutuante Åsgard A. Os próximos passos incluem uma implementação mais ampla no Projeto de Expansão Snorre, onde sete SDS podem ser usados (integrados a coletores ou autônomos com tampas de proteção de fibra de vidro) separados por 15 quilômetros e conectados à energia e às comunicações no layout de campo.
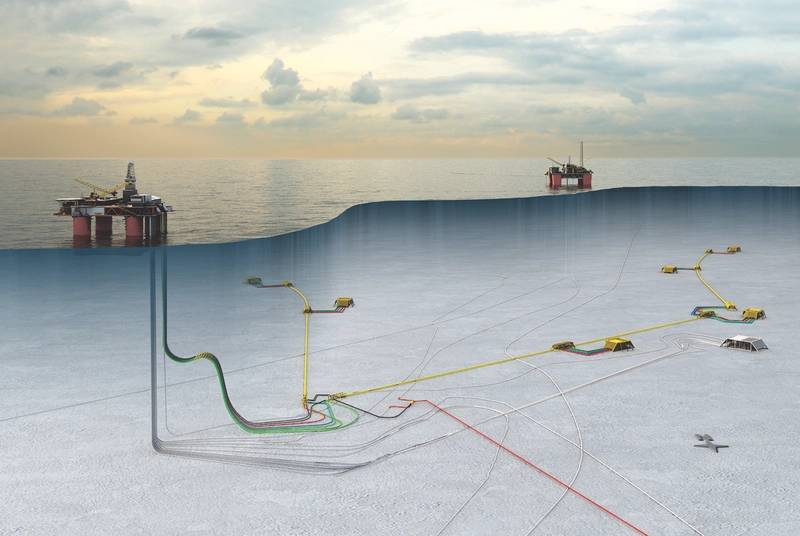 O layout do campo do Projeto de Expansão Snorre, que em breve poderá ser suportado por drones subaquáticos. (Imagem: Equinor)
O layout do campo do Projeto de Expansão Snorre, que em breve poderá ser suportado por drones subaquáticos. (Imagem: Equinor)
Desenvolvendo novos modelos
Esses desenvolvimentos agora estão influenciando a maneira como novos empreendimentos greenfields estão sendo planejados, diz Jamieson. De fato, a i-Tech 7 investigou os serviços de IRM em todo o campo para a Equinor usando um UID no campo Snorre Expansion Project (SEP) e Snorre A (SNA) no mar da Noruega, bem como em outros campos.
O estudo avaliou o potencial para a introdução de veículos híbridos submarinos, identificando quaisquer lacunas técnicas que impediriam a implantação a longo prazo do UID no fundo do mar. Também avaliou e recomendou opções para configurações da estação de ancoragem para apoiar o veículo, fornecendo uma visão geral das configurações e características necessárias. Como a energia e uma rede de dados confiável são parte integrante do seu sucesso, a empresa examinou as disposições operacionais e de gerenciamento para apoiar a atividade do veículo híbrido submarino. O objetivo final do projeto era recomendar um plano de desenvolvimento para permitir que os drones entrassem em operação no final de 2020.
“Os veículos hospedados no fundo do mar, que são suportados por estações de ancoragem no fundo do mar, utilizados para inspeções autônomas e vinculados às salas de controle em terra, o controle humano no circuito nas tarefas de intervenção está novamente pressionando os requisitos de maneira positiva”, diz Jamieson. “Os veículos deverão residir no subsolo por meses seguidos, sem manutenção ou recuperação para reparo. Essa barra mais alta de confiabilidade e controle também está capacitando as operações tradicionais de ROV, com controle remoto de veículos dos centros de controle em terra e eletrificação de veículos para aumentar a confiabilidade e a eficiência. ”Isso tudo resulta em menos dias de embarcação e pessoas no exterior.
Existe potencial para tornar os sistemas submarinos mais simples. Os atuadores, que não sejam sistemas críticos de segurança, podem ser manuais, em vez de hidráulicos ou elétricos, reduzindo os sistemas hidráulicos e elétricos que precisam ser instalados submarinos - o que significa menos cabos.
Helge Sverre Eide, gerente de negócios da Blue Logic, diz que, para que os drones decolem submarinos, o sistema submarino e as filosofias operacionais precisam mudar. "Para que isso seja econômico, você precisa aumentar o escopo do trabalho dos drones", diz ele. “Você precisa de novas ferramentas e precisa ajustar ou alterar o sistema de produção submarino. Você precisa alterar os dois lados da equação. Novas ferramentas devem ser leves para que um drone possa voar com elas. A manutenção submarina precisa mudar para ter peças menores para trocar. Uma mentalidade diferente - se algo desligar, você pode simplesmente mudar - agora é possível. Essa é uma nova filosofia. ”
 (Foto: Saipem) (Foto: Saipem) |
Na Itália, a Saipem está ocupada com o Hydrone R, que iniciou um teste de seis meses no "parque infantil" subaquático de Saipem, perto do porto de Trieste, no nordeste da Itália. Foi anunciado recentemente que o veículo será implantado pela Equinor no exterior da Noruega em 2020. A Equinor, em nome da licença Njord, concedeu à Saipem um contrato de serviço submarino de US $ 43,7 milhões e US $ 43,7 milhões para usar a tecnologia a partir do momento em que o campo Njord retomar a produção. . O Hydrone R é descrito como um ROV híbrido com recursos AUV, por exemplo, terá manipuladores para trabalhos de intervenção e pode funcionar em uma corda de 300 metros de comprimento, para controle em tempo real da largura de banda total, mas também pode percorrer distâncias entre submarinos campos, untethered como um AUV, com comunicações acústicas de até 4 quilômetros. Uma vez no local de trabalho, ele poderia mudar para comunicações ópticas de alta largura de banda para operações supervisionadas. O Hydrone pode ser implantado em uma garagem no fundo do mar ou em um sistema implantado na superfície em uma base de missão. Com capacidade para 3.000 metros, poderia operar por 8 a 10 horas sem corda, e por até 10 quilômetros, diz Stefano Maggio, gerente técnico da Saipem. A implantação de um host de superfície pode ser mais fácil porque você não precisa de infraestrutura submarina, diz Maggio. “Você pode ser sensível às condições climáticas para implantação, mas possui facilidade de manutenção fácil.” No entanto, “o sistema residente submarino é insensível ao clima, portanto você o implanta e fica lá por seis meses, um ano, antes da recuperação. Mas isso significa que você não pode mantê-lo regularmente, portanto é necessária a mais alta confiabilidade. ” |
O BOEM propõe o leilão BBG3, o terceiro leilão de concessões no Golfo da América.

Dolphin Drilling e Vantris fecham acordo de marketing para a plataforma semissubmersível Blackford Dolphin
")
Mubadala contrata a SLB para serviços de perfuração em águas profundas na costa da Indonésia.
-168002 "(Crédito: SLB)")
Transocean e Valaris unem forças para criar uma gigante de perfuração offshore de US$ 17 bilhões com 73 plataformas.
")
A segunda fase do projeto Congo LNG da Eni inicia as exportações com a primeira carga de GNL (Vídeo)
-167856 "(Crédito: Eni)")
Poço exploratório em bloco offshore do Mar Negro não apresentou resultados satisfatórios.
")
A primeira turbina se ergue imponente no parque eólico offshore de 2,6 GW da Dominion Energy nos EUA.
-167623 "(Crédito: Dominion Energy)")
Equinor estende permanência da plataforma de perfuração Seadrill na costa do Brasil.

O campo de Sèmè da Akrake está pronto para iniciar a produção no início de fevereiro, após a conclusão da perfuração.
-167415 "Stella Energy 1 MOPU (Crédito: Drydocks World)")
A Seadrill reforça seu volume de trabalho de perfuração offshore com a conquista de contratos em várias regiões.
")
A Brava Energia comprará a participação da Petronas nos ativos da Bacia de Campos por US$ 450 milhões.
-167178 "(Crédito: Brava Energia)")
Ulstein Verft lança o primeiro de dois novos navios CSOV da JP Morgan.
-166941 "(Crédito: Ulstein Verft)")