Bons veículos submarinos vêm em pacotes pequenos
-109905 "O Riptide AUV (Credit BAE Systems)")
O Riptide AUV (Credit BAE Systems)
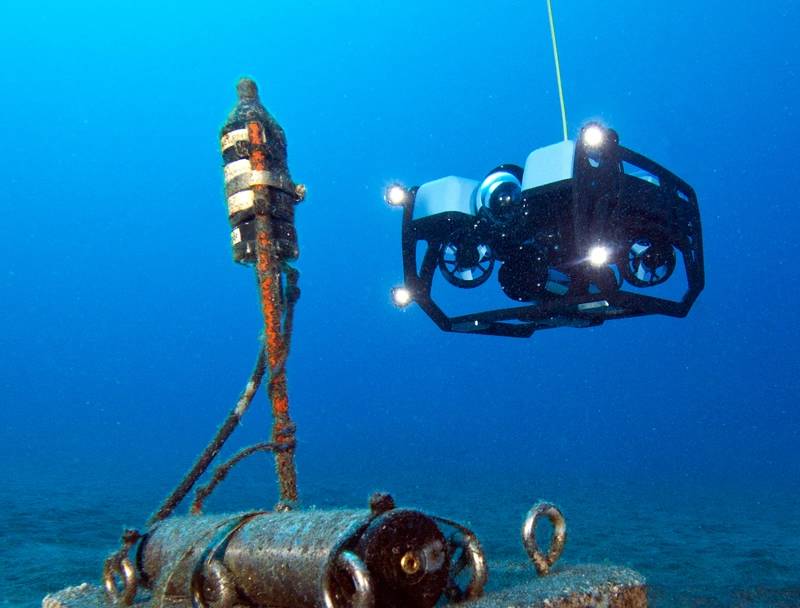
-109906 "Um Trident ROV (crédito SOFAR Ocean)")
Um Trident ROV (crédito SOFAR Ocean)
")
RangerBot sobre um recife (Crédito Matthew Dunbabin / QUT)
A temporada de festas acabou de passar e muitos podem ter ouvido a frase "coisas boas vêm em pequenos pacotes". Isso vale para os veículos submarinos de hoje? De fato faz. Uma das tendências recentes mais marcantes no campo é a proliferação de veículos submarinos compactos e acessíveis, mas altamente eficazes. A década passada viu novos veículos operados remotamente (ROVs) e veículos subaquáticos autônomos (AUVs) produzidos que são facilmente transportados e implantados por uma pessoa. Capitalizando os desenvolvimentos em circuitos, sensores e baterias inspirados no setor de eletrônicos de consumo, esses pequenos veículos ultrapassam sua classe de peso em aplicações práticas.
Existem muitos exemplos de ROV e AUV que se pode considerar, mas vale a pena revisar uma seleção de quatro como exemplos da categoria. Eles também oferecem perspectivas contrastantes sobre algumas das principais opções técnicas e operacionais. Para ROVs, o Sofar Ocean Trident representa talvez o auge do desempenho compacto e da otimização do projeto. Enquanto a Blue Robotics apropriadamente chamada BlueROV apresenta uma opção mais flexível. Nos AUVs, a abordagem "clássica" altamente projetada é demonstrada pelo micro veículo BAE Systems Riptide, embora com uma perspectiva de software muito flexível. Um novo participante da Universidade de Tecnologia de Queensland, o RangerBot, apresenta uma nova mudança de paradigma para manter os custos baixos para casos de uso específicos.
Começando com os ROVs, o BlueROV da Blue Robotics apresenta um fator de forma típico de ROV. Projetado exatamente como um ROV de trabalho ou pesquisa maior, o veículo possui uma estrutura aberta, com os componentes eletrônicos e de bateria, propulsores, espuma de flutuação e pesos de lastro. Esse design simples é robusto, expansível e totalmente familiar para o campo. O sistema oferece configurações de seis e oito propulsores, muitos acessórios opcionais e desempenho e flexibilidade significativos. Mas a nova abordagem para redução de custos e gerenciamento de complexidade torna isso um divisor de águas.
Para manter os custos baixos, o BlueROV é enviado parcialmente montado, exigindo uma estimativa de seis a doze horas de montagem do usuário para ser concluído. Embora seja uma economia de custos para o comprador, também oferece aos clientes a chance de entender os componentes e a arquitetura do sistema. Isso suporta uma ferramenta destinada a modificações e atualizações do usuário final. O veículo utiliza tecnologias comuns de drones e emprega o firmware de controle ArduSub de código aberto, oferecendo recursos úteis e uma extensa comunidade de usuários. O operador controla o ROV com um laptop e um controlador de jogo. O aplicativo QGroundControl de código aberto fornece a interface do usuário. Essa potente combinação de tecnologia é oferecida a um preço de entrada notavelmente baixo, de US $ 3.500. Isso traz um ROV verdadeiramente capaz para um novo público significativo.
 A BlueROV (Credit Blue Robotics, Jeff Milisen) Também está expandindo a audiência de ROVs o Trident do Sofar Ocean, anteriormente OpenROV. Esse ROV compacto é um estudo de caso em otimização de engenharia. Seu fator de forma e arquitetura são uma evolução significativa de outros ROVs movidos a bateria. O Trident possui um design exclusivo que combina a versatilidade e o controle de um ROV (Veículo Operado Remotamente) e a eficiência de um AUV (Veículo Subaquático Autônomo). Ele pode realizar transectos lineares estendidos e manobras complexas em espaços apertados. Usando apenas três propulsores, em uma configuração de deslocamento exclusiva, o ROV pode avançar com eficiência, mas manobrar com muita delicadeza. O propulsor vertical descentralizado do ROV pode fazer com que ele afunde em alta velocidade, mas também flutua ou altera a profundidade sem se inclinar enquanto opera em baixas velocidades - semelhante à maneira como um ROV tradicional funciona. Além do design hidrodinâmico elegante, o Trident foi projetado para ser altamente portátil e bastante durável. O ROV é pequeno o suficiente para caber em uma mochila, enquanto seus painéis laterais são moldados com um revestimento de borracha, dando a ele uma forma de pára-choques. A interface do usuário é baseada em padrões da Internet, como HTML5 e WebGL, para permitir a pilotagem através de apenas um navegador executado em laptops, tablets e dispositivos móveis. A adoção de modernas abordagens de software livre garante que a base de código possa ser atualizada continuamente pela comunidade e pela empresa. Isso permite que alterações de software orientadas ao usuário, como novas interfaces de usuário, moldem a experiência operacional e o fornecimento de recursos aprimorados de ROV para a comunidade global do Trident.
A BlueROV (Credit Blue Robotics, Jeff Milisen) Também está expandindo a audiência de ROVs o Trident do Sofar Ocean, anteriormente OpenROV. Esse ROV compacto é um estudo de caso em otimização de engenharia. Seu fator de forma e arquitetura são uma evolução significativa de outros ROVs movidos a bateria. O Trident possui um design exclusivo que combina a versatilidade e o controle de um ROV (Veículo Operado Remotamente) e a eficiência de um AUV (Veículo Subaquático Autônomo). Ele pode realizar transectos lineares estendidos e manobras complexas em espaços apertados. Usando apenas três propulsores, em uma configuração de deslocamento exclusiva, o ROV pode avançar com eficiência, mas manobrar com muita delicadeza. O propulsor vertical descentralizado do ROV pode fazer com que ele afunde em alta velocidade, mas também flutua ou altera a profundidade sem se inclinar enquanto opera em baixas velocidades - semelhante à maneira como um ROV tradicional funciona. Além do design hidrodinâmico elegante, o Trident foi projetado para ser altamente portátil e bastante durável. O ROV é pequeno o suficiente para caber em uma mochila, enquanto seus painéis laterais são moldados com um revestimento de borracha, dando a ele uma forma de pára-choques. A interface do usuário é baseada em padrões da Internet, como HTML5 e WebGL, para permitir a pilotagem através de apenas um navegador executado em laptops, tablets e dispositivos móveis. A adoção de modernas abordagens de software livre garante que a base de código possa ser atualizada continuamente pela comunidade e pela empresa. Isso permite que alterações de software orientadas ao usuário, como novas interfaces de usuário, moldem a experiência operacional e o fornecimento de recursos aprimorados de ROV para a comunidade global do Trident.
Este pacote fácil de usar e de alto desempenho está disponível na Amazon, custando US $ 1.700. É realmente uma nova era para robôs oceânicos acessíveis e úteis. Aqueles que procuram uma experiência vinculada podem selecionar um sistema altamente otimizado ou uma abordagem modular com mais capacidade de configuração do usuário final. Em qualquer um dos casos, pelo custo de um laptop ou PC moderno, pode-se estar totalmente equipado para realizar missões significativas em profundidades de até 100 metros. Aqueles que desejam "cortar o cordão" têm opções adicionais.
AUVs eficazes tornaram-se menores e mais acessíveis nos últimos anos. Assim como seus primos de ROV, existem vários exemplos a serem considerados. O moderno "micro" AUV talvez esteja melhor associado aos produtos da BAE Systems, anteriormente Riptide Autonomous Solutions. Riptide é uma história de veículos pequenos e de rápido crescimento. Fundada em 2015, a Riptide rapidamente entregou uma oferta compacta de AUV.
O primeiro produto da Riptide foi o micro-UUV, um veículo submarino autônomo de código aberto altamente flexível que forneceu uma solução avançada e de baixo custo, adequada para desenvolvedores de autonomia e comportamentos, sensores submarinos e outras novas cargas úteis. O micro-UUV apresentava interfaces abertas de hardware e software, oferecendo aos usuários uma plataforma confiável e robusta para avançar no desenvolvimento da tecnologia. O design do veículo foi otimizado para alta eficiência com a melhor assinatura hidrodinâmica de sua classe. O micro-UUV básico tem 4 7/8 polegadas de diâmetro, 40 polegadas de comprimento e pesa 22 libras. O sistema padrão é classificado para uma profundidade de 300 metros.
Embora esse veículo possa parecer uma indústria "típica", ele é diferenciado por mais do que seu tamanho pequeno. O foco nas necessidades do usuário final foi o mais prevalente no design do software. Ao contrário das arquiteturas proprietárias típicas, o micro-UUV apresentava uma arquitetura flexível, alavancando uma grande quantidade de software de código aberto. Na versão inicial do software micro-UUV, a Riptide ofereceu código para as plataformas de desenvolvimento Arduino e Beaglebone Black, além de suporte para o mecanismo de controle do robô MOOS-IvP. Esse foi um recurso poderoso para qualquer AUV. A um preço inicial em torno de US $ 15.000, havia um interesse significativo no mercado.
Até 2019, o sucesso deste produto foi observado pela BAE Systems. A organização FAST Labs da BAE Systems adquiriu a Riptide e agora está amadurecendo a tecnologia da plataforma e a fabricação de escala. O FAST Labs é o braço de pesquisa e desenvolvimento da BAE Systems, Inc. e é único na
defesa como um negócio interno de P&D, financiado pelo cliente, projetado para
colabore em toda a empresa global da empresa para desenvolver e fazer a transição de tecnologias avançadas. O micro AUV originalmente lançado pela Riptide está se beneficiando desse processo.
Outro pequeno AUV que entrou recentemente em cena é o RangerBot. Este veículo adota uma abordagem diferente para fornecer uma solução acessível para os usuários finais. O RangerBot foi projetado por engenheiros da Universidade de Tecnologia de Queensland (QUT) em Brisbane, Austrália. A equipe da QUT trabalha em um centro de robótica focado em visão de máquina. Eles também trabalham para apoiar avaliações ambientais na Grande Barreira de Corais. Uma mudança de paradigma importante foi permitida quando a equipe, reconhecendo que as condições da água em seu ambiente-alvo eram muito claras, optou por empregar exclusivamente sensoriamento baseado em visão.
 RangerBot sobre um recife (Crédito Matthew Dunbabin / QUT) Isso talvez pareça óbvio, mas abandonando o tamanho, a potência e, principalmente, as penalidades de custo dos instrumentos acústicos, o RangerBot se tornou menor, mais fácil de usar e mais acessível do que as alternativas típicas. Usando uma série de câmeras, o RangerBot pode gerenciar seu curso horizontal sobre a parte inferior e sua profundidade. Usando as mais recentes ferramentas de mosaico de fotos, o veículo também pode produzir produtos de dados úteis em um site de pesquisa. Os sistemas visuais também permitem aplicações complexas de gerenciamento ambiental. O RangerBot, e seus protótipos predecessores, provou ser capaz de identificar COTS (Star of Crown of Thorns Starfish), um predador que pode devastar os recifes de coral. Os AUVs também demonstraram a capacidade de transportar uma carga útil que pode eliminar o COTS através da injeção precisa de uma solução que prejudica apenas o organismo invasor. A interface de carga útil que suporta essa missão também está ajudando na restauração dos recifes. Uma bexiga de até 8 litros de larvas de coral pode ser instalada no RangerBot. Usando suas capacidades de visão automatizada, o AUV pode identificar espaços vazios adequados em um recife degradado e depositar a concentração apropriada de larvas. Assim, um RangerBot totalmente carregado pode semear aproximadamente 250 metros quadrados de recife. Isso é mais eficiente que as técnicas anteriores baseadas em mergulhadores.
RangerBot sobre um recife (Crédito Matthew Dunbabin / QUT) Isso talvez pareça óbvio, mas abandonando o tamanho, a potência e, principalmente, as penalidades de custo dos instrumentos acústicos, o RangerBot se tornou menor, mais fácil de usar e mais acessível do que as alternativas típicas. Usando uma série de câmeras, o RangerBot pode gerenciar seu curso horizontal sobre a parte inferior e sua profundidade. Usando as mais recentes ferramentas de mosaico de fotos, o veículo também pode produzir produtos de dados úteis em um site de pesquisa. Os sistemas visuais também permitem aplicações complexas de gerenciamento ambiental. O RangerBot, e seus protótipos predecessores, provou ser capaz de identificar COTS (Star of Crown of Thorns Starfish), um predador que pode devastar os recifes de coral. Os AUVs também demonstraram a capacidade de transportar uma carga útil que pode eliminar o COTS através da injeção precisa de uma solução que prejudica apenas o organismo invasor. A interface de carga útil que suporta essa missão também está ajudando na restauração dos recifes. Uma bexiga de até 8 litros de larvas de coral pode ser instalada no RangerBot. Usando suas capacidades de visão automatizada, o AUV pode identificar espaços vazios adequados em um recife degradado e depositar a concentração apropriada de larvas. Assim, um RangerBot totalmente carregado pode semear aproximadamente 250 metros quadrados de recife. Isso é mais eficiente que as técnicas anteriores baseadas em mergulhadores.
Inspirada por esses esforços bem-sucedidos de pesquisa, a equipe da QUT otimizou o design do RangerBot para produção e está se preparando para apoiar um esforço de comercialização. Quando essa variante de produto chegar ao mercado, ela oferecerá uma solução poderosa que combina a eficiência da natação livre de AUV com os níveis de manobra do ROV, além de recursos avançados de inspeção e inspeção. A ressalva aqui é que a clareza da água deve ser suficientemente alta para que a tecnologia visual funcione. Mas existem muitos desses ambientes operacionais no oceano global.
Os exemplos apresentados aqui são oferecidos para validar a afirmação de que "bons veículos submarinos vêm em embalagens pequenas". Os usuários de ROV e AUV podem encontrar muitas opções, inclusive além dos sistemas discutidos aqui. As tendências subjacentes a esses desenvolvimentos incluem uma maior adoção de software de código aberto, ferramentas modernas de produção e benefícios de custo de outros campos, principalmente eletrônicos de consumo. O impacto do pensamento inovador e do design de folhas limpas também é notável. Os veículos apresentados aqui, e muitas outras ofertas compactas em campo, se beneficiam do pensamento de indivíduos ou organizações que são novos no setor. Liberar-se de tecnologias mais antigas, ou conceitos de design, parece ser uma grande idéia para permitir a comunidade menor de veículos submarinos.
O BOEM propõe o leilão BBG3, o terceiro leilão de concessões no Golfo da América.

Dolphin Drilling e Vantris fecham acordo de marketing para a plataforma semissubmersível Blackford Dolphin
")
Mubadala contrata a SLB para serviços de perfuração em águas profundas na costa da Indonésia.
-168002 "(Crédito: SLB)")
Transocean e Valaris unem forças para criar uma gigante de perfuração offshore de US$ 17 bilhões com 73 plataformas.
")
A segunda fase do projeto Congo LNG da Eni inicia as exportações com a primeira carga de GNL (Vídeo)
-167856 "(Crédito: Eni)")
Poço exploratório em bloco offshore do Mar Negro não apresentou resultados satisfatórios.
")
A primeira turbina se ergue imponente no parque eólico offshore de 2,6 GW da Dominion Energy nos EUA.
-167623 "(Crédito: Dominion Energy)")
Equinor estende permanência da plataforma de perfuração Seadrill na costa do Brasil.

O campo de Sèmè da Akrake está pronto para iniciar a produção no início de fevereiro, após a conclusão da perfuração.
-167415 "Stella Energy 1 MOPU (Crédito: Drydocks World)")
A Seadrill reforça seu volume de trabalho de perfuração offshore com a conquista de contratos em várias regiões.
")
A Brava Energia comprará a participação da Petronas nos ativos da Bacia de Campos por US$ 450 milhões.
-167178 "(Crédito: Brava Energia)")
Ulstein Verft lança o primeiro de dois novos navios CSOV da JP Morgan.
-166941 "(Crédito: Ulstein Verft)")